02:50:14
软件为何越来越慢?40分钟优化变32毫秒的编程启示
在开发图形处理工具时,一个植被种植算法从需要40分钟优化到32毫秒。资深工程师通过真实案例揭示了软件性能低下的根本原因——不是硬件限制,而是低效的编程思维陷阱。
01. 速度决定产品命运:性能落后的血泪教训
交互迟滞被用户抛弃
Windows CE的溃败:当年功能全面且支持办公应用的Windows CE手持设备,最终被功能更少的初代iPhone替代,主要原因在于两者的用户体验差异:
失败表现:
触摸延迟达200ms以上、滚动掉帧严重
对比方案:
iPhone保持60帧流畅滚动、点击响应≤30ms
现代竞争指标
苹果iPad Pro直接将30ms触控延迟作为核心卖点,Google Maps通过即时地图拖拽颠覆MapQuest。这些事实印证了响应速度对产品的终极影响——低效软件必被用户淘汰。
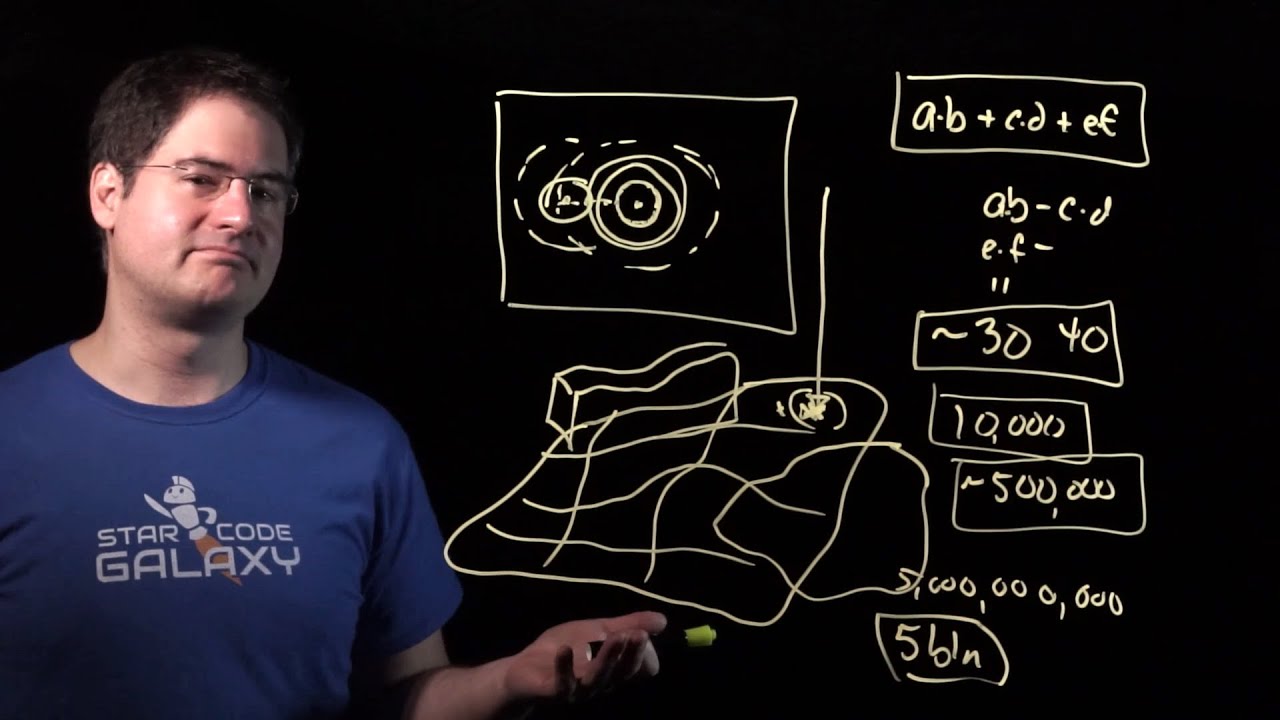
02. 效率坍塌的典型场景:植被生成算法的困境
在游戏《The Witness》的开放世界中,艺术家工具存在严重效率问题——植被种植每次操作需等待30秒以上,阻碍创作效率:
核心任务缺陷:在指定区域内生成不重叠且分布自然的植被(技术上需要生成"泊松圆盘分布/ Poisson disk distribution”坐标)
原始算法双病灶
采样缺陷
采用随机采样+碰撞检测:越后期查找空位越难,95%时间浪费在最后5%区域。
堆栈开销
单次光线检测调用15层函数栈,触发操作系统级malloc内存分配:
算法改进路径演变:
1级优化:减少后期采样时间
用波前生长替代纯随机采样,总采样量从70,000次→7,000次
2级优化:加速基础单元操作
单个光线检测处理时间从400ms→1ms
03. 深度性能优化的技术逻辑:空间转换/SIMD
最终重构方案结合计算几何与硬件特性,核心思想是剥离无效计算:
全局处理结构升级
- 建立全场景空间网格索引,预载所有三角形数据至连续内存区
- 采用预处理转化:将任意三角剖分转化为标准重心坐标系处理
- 优化效果:取消每次检测90%的数据收集逻辑
SIMD硬件直通方案
| 对比维度 | 传统检测 | SIMD优化检测(AVX指令集) |
|---|---|---|
| 线程利用能力 | 单核串行处理 | 每周期计算8个三角形 |
| 数据处理核心 | 条件分支判断 | 无分支指令流 |
关键技术说明
重心坐标系检测:预处理将3维相交判断转化为2个基础向量运算,
SIMD向量压缩:20条指令代替2000行函数调用堆栈
04. 行业的真正病灶:性能认知系统性问题
三大根源性错觉
1. 算力充足假象:
开发者错误估计性能极限值: 认为30秒操作“理所当然",真实硬件(Intel Skylake i7)却能在32ms内完成计算
2. 效率估算缺位:
缺失核心技能公式:运算次数/(处理器核心数 × 指令集宽度 × 时钟周期)=理论耗时
3. 代码堆积陷阱:
盲目复用库函数引发雪崩式消耗: Raycast检测涉及15层函数调用,触发系统内存分配,实际几何计算占比不到1%
性能优化的本质操作:
计算转移:通过重构处理阶段(70%数据预聚合→30%实时处理)
效率估算基础必须掌握:计算硬件操作数量级
05. 技术重构的可复制范式
重构五步法则
- 基线测量:逐行统计真实耗时分布
- 计算模型:比较实际耗时与硬件理论极限差
- 无效剥离:系统调用等非必要操作进行预处理化
- 指令精简:应用SIMD/GPU并行指令替换分支逻辑
- 内存流优化:配置连续内存区块匹配处理器缓存行结构
核心策略思维重塑
速度不仅关乎编码技术,更是产品存活策略。从Windows CE到现代地图应用的演进证明,市场终将选择执行效率更高的系统——优化延迟不再单纯追求提升速度,更是在建立不可回避的产品竞争力。
 揭秘Roblox百万富翁:24小时亲历,年入百万的游戏开发之道
揭秘Roblox百万富翁:24小时亲历,年入百万的游戏开发之道
 如何零经验打造月入4万美元的iPhone应用
如何零经验打造月入4万美元的iPhone应用
 中国抗战胜利80周年阅兵彩排,多款新兵器首次曝光
中国抗战胜利80周年阅兵彩排,多款新兵器首次曝光
 韩国造船业的“神话”是如何炼成的?
韩国造船业的“神话”是如何炼成的?
 中国如何“制造”并使用天才?顶尖理工博士年薪2亿韩元起步的背后
中国如何“制造”并使用天才?顶尖理工博士年薪2亿韩元起步的背后
 Covered Call ETF完全解析:高收益背后的风险,你可能被“骗”了
Covered Call ETF完全解析:高收益背后的风险,你可能被“骗”了
 从地下室到2500万美元估值:David Park的AI创业逆袭与癌症抗争
从地下室到2500万美元估值:David Park的AI创业逆袭与癌症抗争
 软件的革命:Andrej Karpathy 谈 AI 如何重塑开发范式
软件的革命:Andrej Karpathy 谈 AI 如何重塑开发范式
 机器人股票是金矿还是泡沫?会计师深度剖析韩国三大机器人公司财务真相
机器人股票是金矿还是泡沫?会计师深度剖析韩国三大机器人公司财务真相
 VPN行业的隐秘陷阱:你所信赖的隐私工具可能正在监控你
VPN行业的隐秘陷阱:你所信赖的隐私工具可能正在监控你
 中国如何成为科技强国?从“863计划”到“千人计划”的战略布局
中国如何成为科技强国?从“863计划”到“千人计划”的战略布局
 公开反对UnitedHealthcare后,我面临破产风险
公开反对UnitedHealthcare后,我面临破产风险
 Michael Seibel:打造成功产品的9条反直觉原则与实战经验
Michael Seibel:打造成功产品的9条反直觉原则与实战经验
 内向者的逆袭:Charlie Chang如何靠6个YouTube频道实现年收240万美元
内向者的逆袭:Charlie Chang如何靠6个YouTube频道实现年收240万美元
 打造个人品牌:从0到1的完整指南
打造个人品牌:从0到1的完整指南
 美联储转向的背后:一场精心策划的政策组合拳
美联储转向的背后:一场精心策划的政策组合拳
 就业市场再变天:年轻男性大学毕业生失业率创历史新高
就业市场再变天:年轻男性大学毕业生失业率创历史新高
 从4000美元到4800万美元:两位创业者的绝地反击与客户洞察革命
从4000美元到4800万美元:两位创业者的绝地反击与客户洞察革命
 韩国造船业迎来"超级周期"?深度解析K-造船可持续竞争力
韩国造船业迎来"超级周期"?深度解析K-造船可持续竞争力
